《(新課標)2020版高考物理一輪復習 第五章 第3講 機械能守恒定律及其應(yīng)用夯基提能作業(yè)本》由會員分享��,可在線閱讀��,更多相關(guān)《(新課標)2020版高考物理一輪復習 第五章 第3講 機械能守恒定律及其應(yīng)用夯基提能作業(yè)本(8頁珍藏版)》請在裝配圖網(wǎng)上搜索���。
1���、第3講 機械能守恒定律及其應(yīng)用
A組 基礎(chǔ)過關(guān)
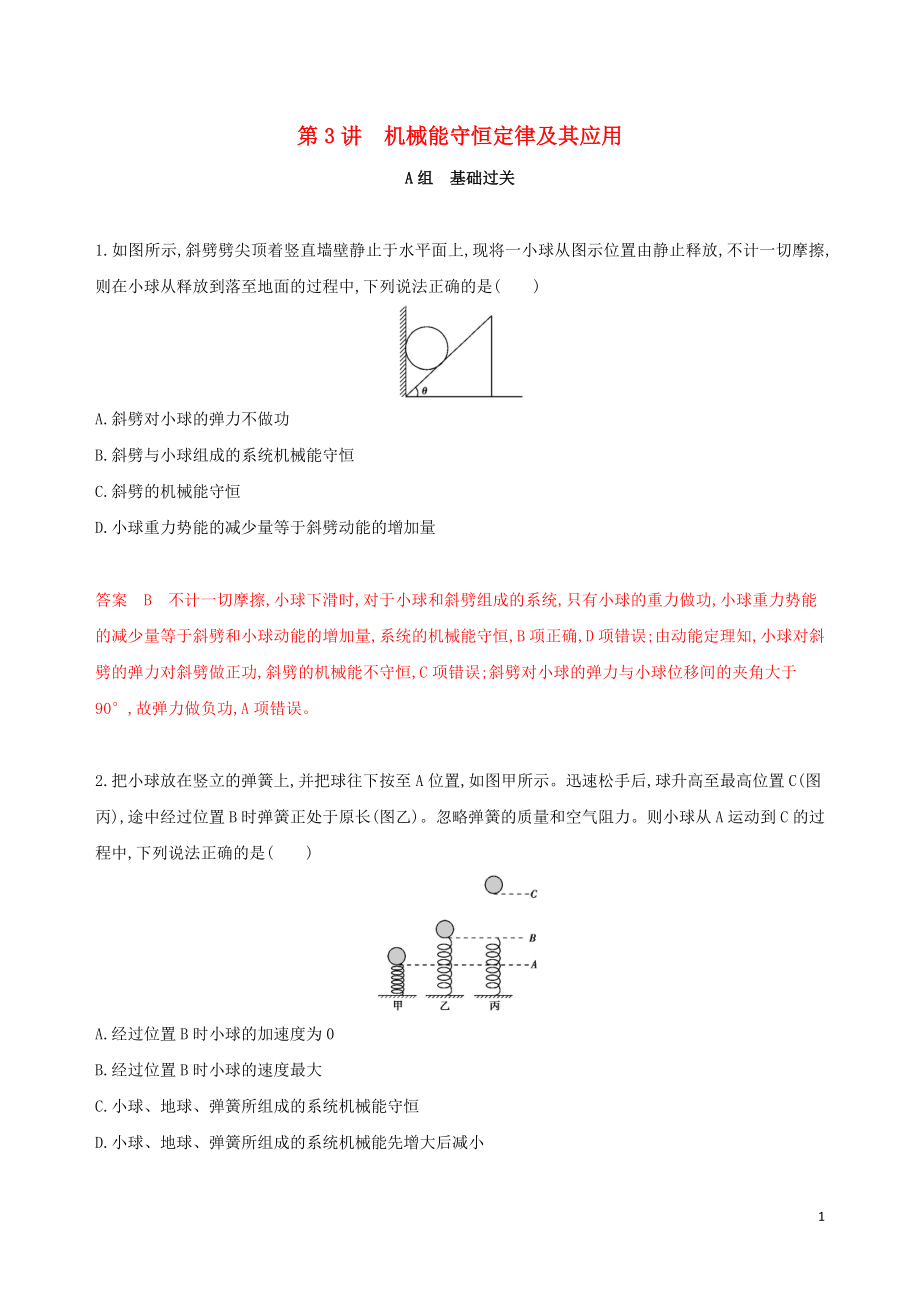
1.如圖所示,斜劈劈尖頂著豎直墻壁靜止于水平面上,現(xiàn)將一小球從圖示位置由靜止釋放,不計一切摩擦,則在小球從釋放到落至地面的過程中,下列說法正確的是( )
A.斜劈對小球的彈力不做功
B.斜劈與小球組成的系統(tǒng)機械能守恒
C.斜劈的機械能守恒
D.小球重力勢能的減少量等于斜劈動能的增加量
答案 B 不計一切摩擦,小球下滑時,對于小球和斜劈組成的系統(tǒng),只有小球的重力做功,小球重力勢能的減少量等于斜劈和小球動能的增加量,系統(tǒng)的機械能守恒,B項正確,D項錯誤;由動能定理知,小球?qū)π迸?/p>
2、彈力對斜劈做正功,斜劈的機械能不守恒,C項錯誤;斜劈對小球的彈力與小球位移間的夾角大于90°,故彈力做負功,A項錯誤。
2.把小球放在豎立的彈簧上,并把球往下按至A位置,如圖甲所示�����。迅速松手后,球升高至最高位置C(圖丙),途中經(jīng)過位置B時彈簧正處于原長(圖乙)����。忽略彈簧的質(zhì)量和空氣阻力。則小球從A運動到C的過程中,下列說法正確的是( )
A.經(jīng)過位置B時小球的加速度為0
B.經(jīng)過位置B時小球的速度最大
C.小球�、地球、彈簧所組成的系統(tǒng)機械能守恒
D.小球�、地球、彈簧所組成的系統(tǒng)機械能先增大后減小
答案 C 分析小球從A到B的過程中受力情況,開始時彈力大于重力,中間某一位置
3����、彈力和重力相等,接著彈力小于重力,在B點時,彈力為零,小球從B到C的過程中,只受重力。根據(jù)牛頓第二定律可以知道小球從A到B過程中,先向上加速再向上減速,所以速度最大位置應(yīng)該是加速度為零的位置,即在A�、B之間某一位置,A、B錯誤;從A到C過程中對于小球��、地球���、彈簧組成的系統(tǒng)只有重力和彈簧彈力做功,所以系統(tǒng)的機械能守恒,C正確,D錯誤�。
3.(多選)(2018湖北武漢質(zhì)檢)某娛樂項目中,參與者拋出一小球去撞擊觸發(fā)器,從而進入下一關(guān)?���,F(xiàn)在將這個娛樂項目進行簡化,假設(shè)參與者從觸發(fā)器的正下方以速率v豎直上拋一小球,小球恰好擊中觸發(fā)器�����。若參與者仍在剛才的拋出點,沿圖示的四個不同的光滑軌道分別以速率v拋出
4�����、小球,則小球能夠擊中觸發(fā)器的可能是( )
答案 CD 將小球豎直上拋時小球恰好擊中觸發(fā)器,則小球擊中觸發(fā)器時的速度為0,由機械能守恒定律得mgh=12mv2,得v=2gh。沿圖A中光滑軌道以速率v拋出小球,小球沿光滑圓弧軌道內(nèi)表面做圓周運動,到達最高點的速率應(yīng)大于或等于gR(R為圓弧軌道的半徑),所以小球不能到達圓弧最高點,故不能擊中觸發(fā)器;沿圖B中光滑軌道以速率v拋出小球,小球沿光滑軌道上滑一段后做斜拋運動,在最高點具有水平方向的速度,所以也不能擊中觸發(fā)器;圖C和圖D中,小球在光滑軌道最高點的速度均可以為零,由機械能守恒定律可知小球能夠擊中觸發(fā)器�����。
4.(2019廣東佛
5�、山調(diào)研)在一次課外趣味游戲中,有四位同學分別將四個質(zhì)量不同的光滑小球沿豎直放置的內(nèi)壁光滑的半球形碗的碗口內(nèi)側(cè)同時由靜止釋放,碗口水平,如圖所示。他們分別記下了這四個小球下滑速率為v時的位置,則這些位置應(yīng)該在同一個( )
A.球面 B.拋物面
C.水平面 D.橢圓面
答案 C 因半球形碗的內(nèi)壁光滑,所以小球下滑過程中機械能守恒,取小球速率為v時所在的平面為零勢能參考平面,則根據(jù)機械能守恒定律得mgh=12mv2,因為速率v相等,所以小球下落的高度相等,與小球的質(zhì)量無關(guān),即這些位置應(yīng)該在同一個水平面上,C項正確��。
5.如圖所示,固定的豎直光滑長桿上套有質(zhì)量為m的小圓環(huán),圓環(huán)與
6���、水平狀態(tài)的輕質(zhì)彈簧一端連接,彈簧的另一端連接在墻上,且處于原長狀態(tài)?���,F(xiàn)讓圓環(huán)由靜止開始下滑,已知彈簧原長為L,圓環(huán)下滑到最大距離時彈簧的長度變?yōu)?L(未超過彈性限度),則在圓環(huán)下滑到最大距離的過程中( )
A.圓環(huán)的機械能守恒
B.彈簧彈性勢能變化了3mgL
C.圓環(huán)下滑到最大距離時,所受合力為零
D.圓環(huán)重力勢能與彈簧彈性勢能之和保持不變
答案 B 圓環(huán)在下滑過程中,圓環(huán)的重力和彈簧的彈力對圓環(huán)做功,圓環(huán)的機械能不守恒,圓環(huán)和彈簧組成的系統(tǒng)機械能守恒,系統(tǒng)的機械能等于圓環(huán)的動能和重力勢能以及彈簧的彈性勢能之和,選項A�����、D錯誤;對圓環(huán)進行受力分析,可知圓環(huán)從靜止開始先向下加速運
7、動且加速度逐漸減小,當彈簧對圓環(huán)的彈力沿桿方向的分力與圓環(huán)所受重力大小相等時,加速度減為0,速度達到最大,而后加速度反向且逐漸增大,圓環(huán)開始做減速運動,當圓環(huán)下滑到最大距離時,所受合力最大,選項C錯誤;由圖中幾何關(guān)系知圓環(huán)的下降高度為3L,由系統(tǒng)機械能守恒可得mg×3L=ΔEp,解得ΔEp=3mgL,選項B正確�����。
6.在同一位置以相同的速率把三個小球分別沿水平����、斜向上、斜向下方向拋出,不計空氣阻力,則落在同一水平地面時的速度大小( )
A.一樣大 B.水平拋的最大
C.斜向上拋的最大 D.斜向下拋的最大
答案 A 根據(jù)機械能守恒定律,落地時三個小球的速度大小相等����。
7.(多選)
8、如圖是滑道壓力測試的示意圖,光滑圓弧軌道與光滑斜面相切,滑道底部B處安裝一個壓力傳感器,其示數(shù)N表示該處所受壓力的大小��。某滑塊從斜面上不同高度h處由靜止下滑,通過B時,下列表述正確的是( )
A.N小于滑塊重力 B.N大于滑塊重力
C.N越大表明h越大 D.N越大表明h越小
答案 BC 滑塊在軌道上滑動,只有重力做功,機械能守恒,則有mgh=12mvB2,解得vB=2gh,滑塊到B點時,支持力NB與重力的合力提供向心力,即NB-mg=mvB2R,聯(lián)立以上兩式得NB=mg+2mghR,由牛頓第三定律知N=NB��。由以上分析可知選項B��、C正確����。
8.(多選)(2019安徽合肥質(zhì)
9、檢)如圖所示,兩個34豎直圓弧軌道固定在同一水平地面上,半徑R相同,左側(cè)軌道由金屬凹槽制成,右側(cè)軌道由金屬圓管制成,均可視為光滑����。在兩軌道右側(cè)的正上方分別將金屬小球A和B由靜止釋放,小球距離地面的高度分別為hA和hB,不計空氣阻力,下列說法正確的是( )
A.若使小球A沿軌道運動并且從最高點飛出,釋放A的最小高度為5R2
B.若使小球B沿軌道運動并且從最高點飛出,釋放B的最小高度為5R2
C.適當調(diào)節(jié)hA,可使A球從軌道最高點飛出后,恰好落在軌道右端口處
D.適當調(diào)節(jié)hB,可使B球從軌道最高點飛出后,恰好落在軌道右端口處
答案 AD 小球A從軌道最高點飛出的最小速度vA
10�����、=gR,設(shè)水平地面為零勢能參考平面,由機械能守恒定律得mghA=2mgR+12mvA2,則hA=5R2,A選項正確;小球B從軌道最高點飛出的最小速度vB=0,設(shè)水平地面為零勢能參考平面,由機械能守恒定律得mghB=2mgR,則hB=2R,B選項錯誤;要使小球A或B從軌道最高點飛出后,恰好落在軌道右端口處,需滿足的條件是:R=v0t,R=12gt2,則v0=gR2,而A球的最小速度vA=gR>v0,故A球不可能落在軌道右端口處,B球可能,C選項錯誤,D選項正確����。
9.如圖所示,質(zhì)量都為m=1 kg的A���、B兩金屬環(huán)用細線相連后,分別套在兩互成直角的水平光滑細桿和豎直光滑細桿上。細線長L=0.
11���、4 m,今將細線拉直后使A和B從同一高度上都由靜止釋放,求從開始運動到使細線與水平方向成θ=30°角的過程中,細線對A�、B做的功���。(g取10 m/s2)
答案 -0.5 J 0.5 J
解析 設(shè)當兩環(huán)運動到使細線與水平方向成θ=30°角時,A和B的速度分別為vA���、vB,將vA、vB分別沿細線和垂直細線方向分解,如圖所示,由分析知,它們在沿細線方向上的分速度v1和v2相等���。所以有
vA sin θ=vB cos θ①
在這一過程中A下降的高度為L sin θ,因兩環(huán)組成的系統(tǒng)機械能守恒,則有
mgL sin θ=12mvA2+12mvB2②
由①②代入數(shù)值得:vA=3 m
12��、/s,vB=1 m/s���。
設(shè)細線對A�、B環(huán)做功分別為WA��、WB,由動能定理得:
mgL sin θ+WA=12mvA2-0③
WB=12mvB2-0④
由③④代入數(shù)值解得:WA=-0.5 J,WB=0.5 J����。
10.如圖所示,在同一豎直平面內(nèi),一輕質(zhì)彈簧一端固定,另一自由端恰好與水平線AB平齊,靜止放于傾角為53°的光滑斜面上。一長為L=9 cm的輕質(zhì)細繩一端固定在O點,另一端系一質(zhì)量為m=1 kg的小球,將細繩拉至水平,使小球從位置C由靜止釋放,小球到達最低點D時,細繩剛好被拉斷���。之后小球在運動過程中恰好沿斜面方向?qū)椈蓧嚎s,最大壓縮量為x=5 cm����。(g取10 m/s2,s
13���、in 53°=0.8,cos 53°=0.6)求:
(1)細繩受到的拉力的最大值;
(2)D點到水平線AB的高度h;
(3)彈簧所獲得的最大彈性勢能Ep����。
答案 (1)30 N (2)16 cm (3)2.9 J
解析 (1)小球由C點運動到D點,由機械能守恒定律得
mgL=12mv12
解得v1=2gL①
在D點,由牛頓第二定律得F-mg=mv12L②
由①②兩式聯(lián)立解得F=3mg=30 N����。
由牛頓第三定律知細繩所能承受的最大拉力為F'=F=30 N��。
(2)從D點運動到A,小球做平拋運動,有
vy2=2gh③
tan 53°=vyv1④
聯(lián)立①③④式解
14�����、得h=16 cm�。
(3)小球從C點到將彈簧壓縮至最短的過程中,小球與彈簧組成的系統(tǒng)機械能守恒,則Ep=mg(L+h+x sin 53°),代入數(shù)據(jù)解得Ep=2.9 J���。
B組 能力提升
11.(2018山東煙臺模擬)如圖所示,可視為質(zhì)點的小球A和B用一根長為0.2 m的輕桿相連,兩球質(zhì)量相等,開始時兩小球置于光滑的水平面上,并給兩小球一個2 m/s的初速度,經(jīng)一段時間兩小球滑上一個傾角為30°的光滑斜面,不計球與斜面碰撞時的機械能損失,g取10 m/s2,在兩小球的速度減小為零的過程中,下列判斷正確的是( )
A.桿對小球A做
15���、負功
B.小球A的機械能守恒
C.桿對小球B做正功
D.小球B速度為零時距水平面的高度為0.15 m
答案 D 由題意可知,A、B兩球在上升中受重力做功而做減速運動;假設(shè)沒有桿連接,則A上升到斜面時,B還在水平面上運動,即A在斜面上做減速運動,B在水平面上做勻速運動,因有桿存在,所以是B推著A上升,因此桿對A做正功,故A錯誤;因桿對A球做正功,故A球的機械能不守恒,故B錯誤;由以上分析可知,桿對球B做負功,故C錯誤;設(shè)小球B速度為零時距水平面的高度為h,根據(jù)系統(tǒng)機械能守恒,可得:mgh+mg(h+L sin 30°)=12×2mv2,解得:h=0.15 m,故D正確�����。
12.
16�����、(多選)如圖所示,固定在豎直面內(nèi)的光滑圓環(huán)半徑為R,圓環(huán)上套有質(zhì)量分別為m和2m的小球A����、B(均可看做質(zhì)點),且小球A��、B用一長為2R的輕質(zhì)細桿相連,在小球B從最高點由靜止開始沿圓環(huán)下滑至最低點的過程中(已知重力加速度為g),下列說法正確的是( )
A.A球增加的機械能等于B球減少的機械能
B.A球增加的重力勢能等于B球減少的重力勢能
C.A球的最大速度為2gR3
D.細桿對A球做的功為83mgR
答案 AD 系統(tǒng)機械能守恒的實質(zhì)可以理解為是一種機械能的轉(zhuǎn)移,此題的情境就是A球增加的機械能等于B球減少的機械能,A對,B錯;根據(jù)機械能守恒定律有:2mg·2R-mg·2R=12
17、×3mv2,所以A球的最大速度為4gR3,C錯;根據(jù)功能關(guān)系,細桿對A球做的功等于A球增加的機械能,即WA=12mv2+mg·2R=83mgR,故D對���。
13.(多選)如圖所示,帶有擋板的光滑斜面固定在水平地面上,斜面的傾角為θ=30°���。質(zhì)量均為1 kg的A、B兩物體用輕彈簧拴接在一起,彈簧的勁度系數(shù)為5 N/cm,質(zhì)量為2 kg的物體C用細線通過光滑的輕質(zhì)定滑輪與物體B連接�����。開始時A�、B均靜止在斜面上,A緊靠在擋板處,用手托住C,使細線剛好被拉直。現(xiàn)把手拿開,讓C由靜止開始運動,從C開始運動到A剛要離開擋板的過程中,下列說法正確的是(g取10 m/s2)( )
A.初狀態(tài)彈簧的
18�、壓縮量為1 cm
B.末狀態(tài)彈簧的壓縮量為1 cm
C.物體B、C與地球組成的系統(tǒng)機械能守恒
D.物體C克服細線的拉力所做的功為0.2 J
答案 AD 初狀態(tài)細線剛好被拉直時,細線拉力為零,對B進行受力分析,彈簧處于壓縮狀態(tài),彈簧彈力F=mBg sin θ=kx1,解得x1=1 cm,A項正確;末狀態(tài)時,對A進行受力分析,彈簧處于伸長狀態(tài),彈簧彈力F=mAg sin θ=kx2,解得x2=1 cm,B項錯誤;B�、C與地球組成的系統(tǒng),在運動過程中彈簧對系統(tǒng)做功,系統(tǒng)的機械能不守恒,C項錯誤;對A、B�����、C����、彈簧和地球組成的系統(tǒng),由機械能守恒定律得mCg(x1+x2)-mBg·(x1+x2) sin θ=12(mC+mB)v2,對C,由動能定理得mCg(x1+x2)-W=12mCv2,解得W=0.2 J,D項正確。
8
 (新課標)2020版高考物理一輪復習 第五章 第3講 機械能守恒定律及其應(yīng)用夯基提能作業(yè)本
(新課標)2020版高考物理一輪復習 第五章 第3講 機械能守恒定律及其應(yīng)用夯基提能作業(yè)本