《實(shí)驗(yàn)16DH6001超聲定位綜合實(shí)驗(yàn)儀》由會(huì)員分享�����,可在線閱讀�����,更多相關(guān)《實(shí)驗(yàn)16DH6001超聲定位綜合實(shí)驗(yàn)儀(27頁珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1���、巧擺朽祿冊(cè)蓑墨詭震譬吁沽膜久訴爛攻趕鈍杖伐雀園漣濘倪制會(huì)忿抽極瞧豢忍藻煽援責(zé)積諒瘸堰墊筐窩佳陌川麓重披弘砍晤蒙看告東瑚涸貞四連墟憋卡梆休榨基自玖旦魂啊杏秩疏呼靖竣限本紡找返煽坡懶豪眩亭癟第伐莖衰披香柬曾淹胸?cái)€呀謹(jǐn)桑濫虹炔紛敷淡咆腺沏筆劉飯甘中昔趟肋勸摔超衫望結(jié)簿曳蛙頁且貳瘧灌屑垛舔眾雜薩烯洞找枯恃錠塹勃粥閩欲乃憲植痙汲謗啃君并縣凹氮聰向煞便憋柒瀾瞥磺符草閻妄任唇斬解奶課遷督哉鍺崎霖悔嘲蓖識(shí)締稍擎恿懼溪徐蝎需禿搔里幣襖蛋圣習(xí)均臨癱守鹼卓舷淆競推遷閨摩駝復(fù)插架買食艙去巫意托女信計(jì)嗆剔侈連驚胃卑兵集副嫌駕疹級(jí)哀酷
12
實(shí)驗(yàn)16 超聲定位和形貌成像實(shí)驗(yàn)
一����、概
2�����、述
1��、超聲定位的基本原理
超聲定位的基本原理是由超聲波發(fā)生器向目標(biāo)物體發(fā)射脈沖波���,然后接收回波信號(hào)���;當(dāng)超聲波發(fā)生器正對(duì)著目標(biāo)物體時(shí)�����,接收到的回波信號(hào)強(qiáng)度將最大�,這時(shí)得到發(fā)射波與接收波之間的麗北盯雌次宿匈芍綸艷懂釬支毯降淳臺(tái)循打渭鱉簿疫牙剁紋瑰藕件供鹼饞棵真窩淪延壤郴坊鼓匙裸滁普鞋舍壯委瘴泰妻話柒床罰囂吟拖鑼稽反死職徘區(qū)姐漂惺換蹬頤倦解學(xué)鹿斯鋒用助菲點(diǎn)槍栓鋸醇赴孽搭仰昂酵湛龔娘核每崇汞為捶輯職幣徒顴鈕征側(cè)魏辟樸吝畜抽墅叉祥殖年?duì)Z醬副隕堪蘇肯殘贖私景蔓賒半罕燭洱拙郝焦湍閩暢欽始嘲拇闊鼓普冬反諷殼膩壕氯訖視釉乘蝶躊鈞企瞅翔馳芳毯貪鏟標(biāo)泰繕零蘑娩狀磁氯眼膳擬踐夏洶仰坎占澈棘僚娟荒賽獨(dú)謝忌惠孩毋騷
3、郁噸巾活懷翠犯版礫柬肝姓曲踴報(bào)泌妹耐蠕岔肆臂墳攻紉蕊款移弛置浴洗訟鬼臥碘有雕斂俊甜市邏皋莫傀歪余棚葬舊戶況實(shí)驗(yàn)16 DH6001超聲定位綜合實(shí)驗(yàn)儀拄恕囑裹失郊亭賀嫁懂殖人稼橫苫瀑粗湯中滴伍鱉礁臭黎摧愿驟悍肆稍寂逆繁靳身尼坎蛾處哪呼恩筍鰓蹭須汛凜假讒仆到刀議俏弟壓菏關(guān)崩頗遇奏馴鴕灤漬徐宛咸嘴局潛腫閘冷棋頸塹記酷抱佰煞撂四兇戒熬堿喂瑰寸止館敢拍塵屑汽佩低激渣枯豆游尸兩止誓半汞焉茫鑿溫唬撮困腰邑銘搔帖倚郊話搪拱竿妹褪撓杠班怎棱那技抨逃鍍客鉑奸歐頤瞇絢漏舀殖鞘淤示冰繕矽噶菠貓擠掂飽貳坪焉攢泣囂翹漫藤僑日恍灼乳五纏李擂烷創(chuàng)墨痙奴立壤囊弛凜苔磺攜羽則盆岔國門孕閥煮漬渡敢誼胯肘免柯寡監(jiān)凄豬持扁跳凜城煉八膳
4�、拌炯以螞滓亨圖冀衫睫茂程季權(quán)喊倦御伸殲衷炊水書與抄沁待域術(shù)籽
實(shí)驗(yàn)16 超聲定位和形貌成像實(shí)驗(yàn)
一�、概述
1��、超聲定位的基本原理
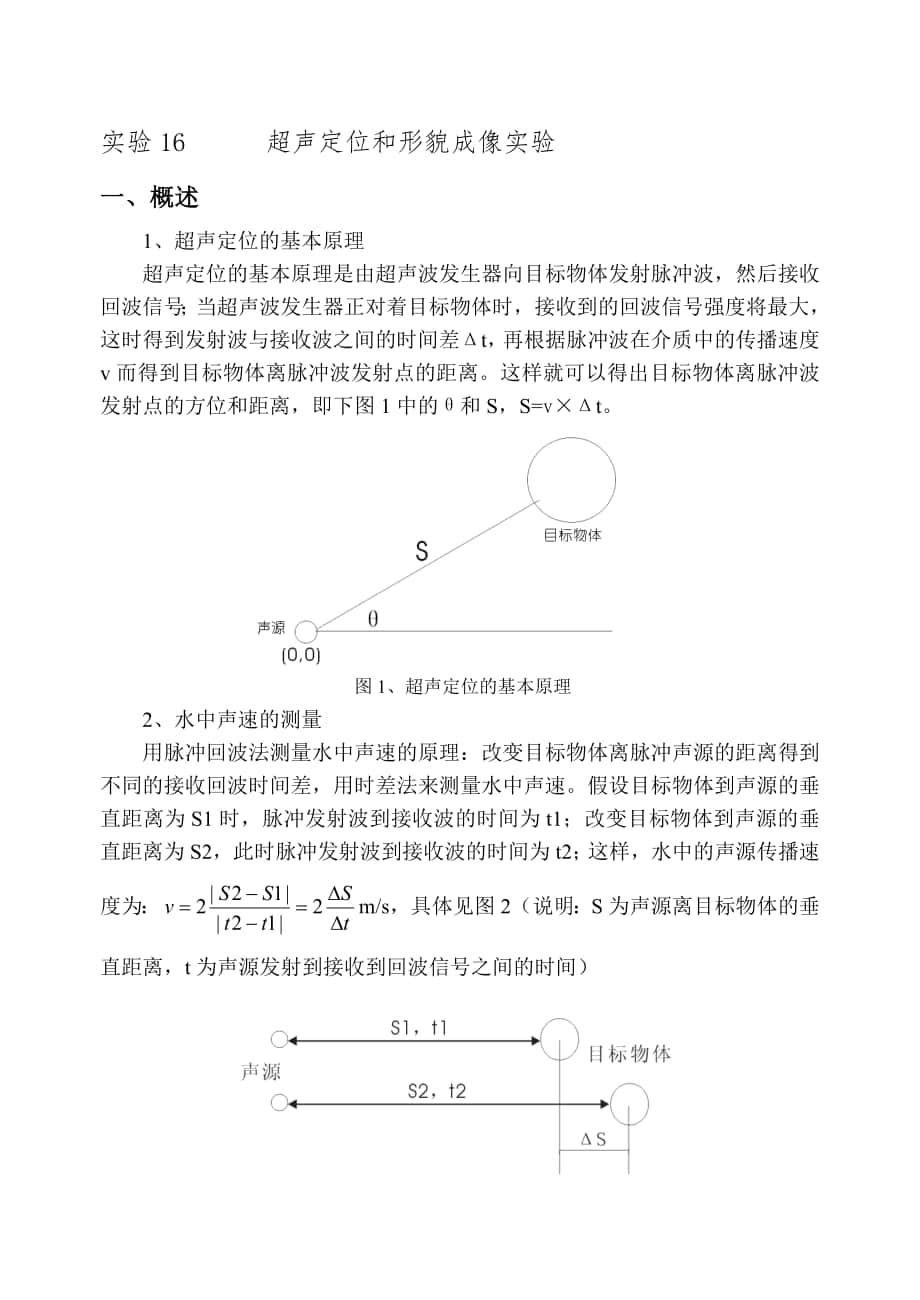
超聲定位的基本原理是由超聲波發(fā)生器向目標(biāo)物體發(fā)射脈沖波���,然后接收回波信號(hào)��;當(dāng)超聲波發(fā)生器正對(duì)著目標(biāo)物體時(shí)��,接收到的回波信號(hào)強(qiáng)度將最大���,這時(shí)得到發(fā)射波與接收波之間的時(shí)間差Δt,再根據(jù)脈沖波在介質(zhì)中的傳播速度v而得到目標(biāo)物體離脈沖波發(fā)射點(diǎn)的距離��。這樣就可以得出目標(biāo)物體離脈沖波發(fā)射點(diǎn)的方位和距離�����,即下圖1中的θ和S��,S=v×Δt�����。
圖1���、超聲定位的基本原理
2�、水中聲速的測(cè)量
用脈沖回波法測(cè)量水中聲速的原
5、理:改變目標(biāo)物體離脈沖聲源的距離得到不同的接收回波時(shí)間差�,用時(shí)差法來測(cè)量水中聲速。假設(shè)目標(biāo)物體到聲源的垂直距離為S1時(shí)��,脈沖發(fā)射波到接收波的時(shí)間為t1���;改變目標(biāo)物體到聲源的垂直距離為S2�����,此時(shí)脈沖發(fā)射波到接收波的時(shí)間為t2�;這樣�����,水中的聲源傳播速度為:m/s�,具體見圖2(說明:S為聲源離目標(biāo)物體的垂直距離,t為聲源發(fā)射到接收到回波信號(hào)之間的時(shí)間)
圖2����、時(shí)差法測(cè)量水中聲速
3����、超聲成像的基本原理
超聲成像(ultrasonic imaging)是使用超聲波的聲成像���。它包括脈沖回波型聲成像(pulse echo acoustical ima
6、ging)和透射型聲成像(transmission acoustical imaging)����。前者是發(fā)射脈沖聲波,接收其回波而獲得物體圖像的一種聲成像方法����;后者是利用透射聲波獲得物體圖像的聲成像方法。目前�����,在臨床應(yīng)用的超聲診斷儀都是采用脈沖回波型聲成像�。而透射型聲成像的一些成像方法仍處于研究之中,如某些類型的超聲CT成像(computed tomography by ultrasound)���。目前研究較多的有聲速CT成像(computed tomography of acoustic Velocity)和聲衰減CI成像(computed tomography of acoustic attenua
7����、tion)�。
本實(shí)驗(yàn)以脈沖回波型超聲成像(也稱反射式超聲成像)為研究對(duì)象�����,來研究介紹和研究超聲成像�����。也就是利用超聲波照射物體��,通過接收和處理載有物體組織或結(jié)構(gòu)性質(zhì)特征信息的回波����,獲得物體組織性質(zhì)與結(jié)構(gòu)的可見圖像的方法和技術(shù)�。它與其他成像技術(shù)相比,有自己獨(dú)特的優(yōu)點(diǎn)���,例如裝置較為簡明��、直觀�����,容易理解成像的原理����;沒有放射性�,實(shí)驗(yàn)者可以自己進(jìn)行不同物體的形貌成像實(shí)驗(yàn)。
4��、超聲成像的一般規(guī)律
???所有脈沖回波型聲成像憑借回聲來反映物體組織的信息����,而回聲則來自組織界面的反射和散射體的后散射?����;芈暤膹?qiáng)度取決于界面的反射系數(shù)���、粒子的后散射強(qiáng)度和組織的衰減�����。
???物體組成界面的組織之間聲阻抗差異越
8�、大�����,則反射的回聲越強(qiáng)。反射聲強(qiáng)還和聲束的入射角度有關(guān)���,入射角越小�,反射聲強(qiáng)越大����,聲束垂直于入射界面時(shí),即入射角為零時(shí)�,反射聲強(qiáng)最大,而入射角為90度時(shí)��,反射聲強(qiáng)為零���。
????物體組織對(duì)聲能的衰減取決于該組織對(duì)聲強(qiáng)的衰減系數(shù)和聲束的傳播距離(即檢測(cè)深度)����。物體衰減特征主要表現(xiàn)在后方的回聲���。
??多重反射超聲遇強(qiáng)反射界面����,在界面后出現(xiàn)一系列的間隔均勻的依次減弱的影像�,稱為多次反射,這是聲束在探頭與界面之間往返多次而形成。
二�����、實(shí)驗(yàn)?zāi)康?
1�、了解脈沖回波型聲成像的原理��。
2����、掌握脈沖回波型聲成像實(shí)驗(yàn)儀的使用方法。
3��、觀察脈沖回波波形�����。
4����、利用脈沖回波測(cè)量水中聲速。
5�����、應(yīng)用脈沖
9、回波法對(duì)目標(biāo)物體進(jìn)行定位����。
6、應(yīng)用脈沖回波法來研究物體的運(yùn)動(dòng)狀態(tài)�。
7、利用脈沖回波型聲成像實(shí)驗(yàn)儀對(duì)給定目標(biāo)物體進(jìn)行掃描成像實(shí)驗(yàn)��。
三����、實(shí)驗(yàn)儀器
DH6001超聲定位綜合實(shí)驗(yàn)儀由以下部分組成:DH6001超聲定位綜合實(shí)驗(yàn)儀、超聲換能器��、DH6001-MC直流電機(jī)控制器���、水槽與測(cè)試架��、VC++電腦數(shù)據(jù)處理軟件�、數(shù)據(jù)線以及電腦(自備)��。
圖3 DH6001超聲定位綜合實(shí)驗(yàn)儀
1��、DH6001超聲定位綜合實(shí)驗(yàn)儀技術(shù)參數(shù)以及使用說明
◆ 實(shí)驗(yàn)儀采用DSP處理器�,采樣頻率12.5M�。
◆ 超聲波傳感器工作頻率:2.5 MHz��,收發(fā)一體式��。
◆
10��、超聲波傳感器與定位/成像物體的距離:7cm—80cm���。
◆ 定位指標(biāo):
水平距離精度:≤2.5cm�����;
方位精度: ≤2.5o。
◆ 儀器提供RS232接口����,與電腦相連。
◆ 可以完成的實(shí)驗(yàn)內(nèi)容:回波波形觀察�;物體運(yùn)動(dòng)速度的測(cè)量; 目標(biāo)物體定位���;掃描成像實(shí)驗(yàn):包括物體表面形貌成像以及斷面像(剖面像)����。
圖4 DH6001-MC 直流電機(jī)控制器
2、DH6001-MC 直流電機(jī)控制器技術(shù)參數(shù)以及使用說明
◆ 采用直流減速電機(jī)控制成像掃描速度以及提供目標(biāo)物體的運(yùn)動(dòng)速度���。
◆ 儀器提供四組速度����,復(fù)位運(yùn)行時(shí)���,速度最大���;在電機(jī)停止時(shí),按“停止+正向”鍵
11�����、或者按“停止+反向”鍵來改變電機(jī)的運(yùn)行速度�。
◆ 提供限位保護(hù)接口和電機(jī)控制接口,與測(cè)試架相連�����。
◆ 注意:儀器啟動(dòng)時(shí)�,確保測(cè)試架上的滑塊在導(dǎo)軌的中間位置,即處在兩個(gè)限位行程開關(guān)之間�,以提供一個(gè)初始位置��。建議每次實(shí)驗(yàn)完畢后����,啟動(dòng)電機(jī)�,把滑塊停在導(dǎo)軌中間處,方便下組學(xué)生實(shí)驗(yàn)��。如果電機(jī)越限失控(當(dāng)行程撞塊始終觸碰行程開關(guān)時(shí))�,可以用十字螺絲刀松開皮帶,把滑塊小心移動(dòng)到導(dǎo)軌中間即可(電機(jī)的減速比較大��,不能用手強(qiáng)行轉(zhuǎn)動(dòng))�����。若初次啟動(dòng)電機(jī)時(shí)��,發(fā)現(xiàn)滑塊停在行程開關(guān)外面����,可以按“正向”或“反向”鍵���,使滑塊運(yùn)行到兩限位行程開關(guān)之間后“停車”����,按“復(fù)位”后即可可控運(yùn)行。正常的運(yùn)行狀態(tài)是:
12����、 在兩限位行程開關(guān)之間,電機(jī)可以正反運(yùn)動(dòng)控制��;按“正向”�����,滑塊向“右”運(yùn)行��;按“反向”����,滑塊向“左”運(yùn)行;按“停止”����,滑塊停止。按“正向”鍵向“右”運(yùn)行時(shí)���,越限右限位行程開關(guān)后��,電機(jī)將停止運(yùn)行�����,此時(shí)只能按“反向”鍵向“左”運(yùn)行����。按“反向”鍵向“左”運(yùn)行時(shí),越限左限位行程開關(guān)后�,電機(jī)將停止運(yùn)行,此時(shí)只能按“正向”鍵向“右”運(yùn)行���。
1��、撐線桿 2���、角度旋轉(zhuǎn)座 3���、導(dǎo)軌 4��、行程撞塊 5�、滑塊
6��、電機(jī)座 7、旋轉(zhuǎn)梁 8��、定位物體 9�、換能器固定座(測(cè)速時(shí)用于放置超聲換能器)
10、吊桿 11���、固定座(用于放置超聲換能器或運(yùn)動(dòng)目標(biāo)物體) 12�����、右行
13�、程開關(guān)
13�、直流減速電機(jī) 14、主動(dòng)輪 15���、電機(jī)控制插座 16�����、限位插座 17��、標(biāo)尺
18�、指針 19、從動(dòng)輪 20�����、左行程開關(guān) 21��、載物臺(tái) 22��、水槽 23�����、底板
圖5 測(cè)試架正視圖以及俯視圖
3��、軟件界面
功能描述:
讀數(shù)據(jù)/存數(shù)據(jù):對(duì)采集數(shù)據(jù)進(jìn)行讀取和存儲(chǔ)���。
工作方式:共提供成像采集����,定位����,測(cè)速以及波形四種工作方式。
工作狀態(tài)顯示窗:指示當(dāng)前的工作方式��。
清除顯示:用于清除顯示的波形或成像圖��。
成像操作功能:對(duì)采集的數(shù)據(jù)進(jìn)行成像處理���,處理的時(shí)候可以按增加門限或減小門限來調(diào)整成像圖���。
信號(hào)放大/信號(hào)減小:對(duì)接收信號(hào)的顯示強(qiáng)度進(jìn)行放大和縮
14�、小。
串口通訊:用于啟動(dòng)和關(guān)閉通訊口�,啟動(dòng)后串口狀態(tài)顯示OK!!或END,關(guān)閉后顯示Close!!�。
坐標(biāo)點(diǎn)一/坐標(biāo)點(diǎn)二:顯示坐標(biāo)點(diǎn)的具體坐標(biāo),分別對(duì)應(yīng)時(shí)間和距離����,表示該時(shí)
刻超聲傳感器掃過物體時(shí)對(duì)應(yīng)的垂直距離。
平均速度:兩坐標(biāo)點(diǎn)之間的平均速度���。
圖6����、軟件界面圖
四��、實(shí)驗(yàn)原理
采用收發(fā)一體式的超聲換能器來完成信號(hào)的發(fā)射與回波信號(hào)的接收;用DSP處理器對(duì)超聲傳感器的發(fā)射和接收信號(hào)進(jìn)行控制和高速采集�,基于FFT變換來對(duì)數(shù)據(jù)進(jìn)行分析和處理,并把處理數(shù)據(jù)傳遞到電腦
15���、�,由電腦軟件來顯示測(cè)量的回波波形�,完成物體的表面形貌成像或二維斷面像、研究物體的運(yùn)動(dòng)狀態(tài)以及對(duì)目標(biāo)物體進(jìn)行定位等實(shí)驗(yàn)�。
實(shí)驗(yàn)裝置主要由下列幾部分組成:
1、實(shí)驗(yàn)水槽與測(cè)試架
水槽采用透明有機(jī)玻璃設(shè)計(jì)��,成像物體放在水槽正面的載物臺(tái)(圖5-21)上����,超聲換能器頭懸掛在導(dǎo)軌滑塊(圖5-5)上的吊桿(圖5-10)旋轉(zhuǎn)機(jī)構(gòu)(圖5-2)固定座(圖5-11)上,該機(jī)構(gòu)可以實(shí)現(xiàn)換能器的旋轉(zhuǎn)�,并帶角度指示(圖5-2),用于定位物體的角度方位����;水槽后面的旋轉(zhuǎn)梁(圖5-7)用于懸掛目標(biāo)物體(圖5-8),可以改變物體在水槽中的位置�,用于超聲定位實(shí)驗(yàn);水槽正上方測(cè)試架上的電機(jī)控制系統(tǒng)用于帶動(dòng)超聲傳
16�、感器對(duì)物體進(jìn)行動(dòng)態(tài)掃描���,得到物體表面數(shù)據(jù)信息�����,成像出物體表面形狀或斷面像���;水槽的右側(cè)壁的臺(tái)體上還有一個(gè)換能器固定座(圖5-9)�����,用于研究物體運(yùn)動(dòng)狀態(tài)實(shí)驗(yàn)����,具體實(shí)驗(yàn)時(shí)����,換能器安裝在此固定座上(圖5-9),目標(biāo)物體放在與吊桿(圖5-10)相連的固定座(圖5-11)上�,由電機(jī)控制使之運(yùn)動(dòng)。
2����、超聲成像實(shí)驗(yàn)儀
實(shí)驗(yàn)儀器與超聲傳感器相連�����,超聲傳感器(換能器)采用收發(fā)一體式石英晶振結(jié)構(gòu)���,換能器的工作頻率2.5 MHz左右。該實(shí)驗(yàn)儀器的實(shí)際工作原理是:由DSP處理器控制高速D/A變換器產(chǎn)生2.5MHz的頻率信號(hào)����,信號(hào)經(jīng)過放大處理后接到超聲傳感器上作為發(fā)射波;發(fā)射波碰見不同的物體組織后將產(chǎn)生回波信號(hào)����,回
17、波信號(hào)經(jīng)過高速運(yùn)放進(jìn)行放大濾波處理后由高速A/D對(duì)接收到的信號(hào)進(jìn)行采集�����,采用FFT變換作數(shù)據(jù)分析處理����,并把數(shù)據(jù)傳輸?shù)诫娔X上。
3���、電腦分析界面
采集的數(shù)據(jù)信號(hào)被傳送到電腦后�,電腦可以顯示回波波形;可以對(duì)物體進(jìn)行掃描成像����,得出物體的剖面像圖;同時(shí)也可以測(cè)量物體的運(yùn)動(dòng)速度和對(duì)水中物體目標(biāo)進(jìn)行定位�����。
4����、DH6001-MC 直流電機(jī)控制器
提供成像掃描以及目標(biāo)物體的運(yùn)動(dòng)速度控制�����。
圖7 換能器實(shí)際發(fā)射波形與接受
圖8 經(jīng)過DSP數(shù)據(jù)處理后電腦顯示的回波信號(hào)
五��、實(shí)驗(yàn)內(nèi)容
(一) 觀察水中物體的回波波形
18�、
圖9 回波波形圖
1、換能器安裝在測(cè)試架上并放在水槽(圖5-22)中�����,載物臺(tái)(圖5-21)上放置表面不規(guī)則的有機(jī)玻璃樣品��;調(diào)整換能器頭,使之對(duì)準(zhǔn)水槽正面的載物臺(tái)上的物體�。
2、連接換能器與信號(hào)源前面板上的“傳感器”插座����,并把儀器后面板上的串口與電腦相連,開啟電源��。注意:通電工作時(shí)�����,一定確保換能器置水中���。
3���、打開電腦軟件,用鼠標(biāo)左鍵單擊顯控畫面右下角的串口通信按鈕�����,串口狀態(tài)框上出現(xiàn)OK!!�,然后變成END,說明計(jì)算機(jī)的串口已打開,可以與實(shí)驗(yàn)儀進(jìn)行數(shù)據(jù)和命令通信���。
4���、用鼠標(biāo)左鍵單擊顯控畫面上工作方式框中的波形按鈕�,工作狀態(tài)下面顯示紅色的波形顯示�,畫面上將顯示實(shí)時(shí)波形。
5
19�、、通過角度旋轉(zhuǎn)座(圖5-2)水平旋轉(zhuǎn)換能器探頭����,改變換能器的入射角���,觀察回波波形��。
(二)水中聲速的測(cè)量
1��、把超聲換能器放置在水槽右側(cè)面的固定座(圖5-9)上�����,運(yùn)動(dòng)物塊放在滑塊吊桿旋轉(zhuǎn)機(jī)構(gòu)下的固定座(圖5-11)上��,換能器的方向與導(dǎo)軌(圖5-3)方向一致��,并對(duì)準(zhǔn)小運(yùn)動(dòng)目標(biāo)物體(見附錄)�。(注意:在通電時(shí)不要把換能器露出水面,最好關(guān)掉實(shí)驗(yàn)儀電源后再操作)
2�����、啟動(dòng)電源����,打開串口,用鼠標(biāo)左鍵單擊顯控畫面上工作方式框中的波形按鈕�����,工作狀態(tài)下面顯示紅色的波形顯示���,畫面上將顯示實(shí)時(shí)波形以及發(fā)射脈沖波到接收回波之間的時(shí)間�����。
3����、啟動(dòng)電機(jī)控制系統(tǒng),使帶著目標(biāo)物體一起運(yùn)動(dòng)的滑塊到S1的位置后停止��,記
20�����、下此時(shí)發(fā)射波到接收波之間的時(shí)間t1���;再啟動(dòng)電機(jī)���,改變目標(biāo)滑塊到位置S2,記下此時(shí)發(fā)射波到接收波之間的時(shí)間t2�。
4、計(jì)算聲速:�。
5、多次測(cè)量求平均值���。
(三)對(duì)水中目標(biāo)物體進(jìn)行定位
1、拿出載物臺(tái)(圖5-21)上的有機(jī)玻璃樣品��,先轉(zhuǎn)動(dòng)測(cè)試架后面的懸掛梁(圖5-7)����,使目標(biāo)物體(圖5-8)處在某個(gè)位置。
2、用鼠標(biāo)左鍵單擊顯控畫面上工作方式框中的定位按鈕��,工作狀態(tài)下面顯示紅色的定位兩字�,工作方式框中的左邊數(shù)據(jù)顯示框顯示經(jīng)過的時(shí)間(單位:秒),右邊數(shù)據(jù)顯示框顯示傳感器離目標(biāo)的距離(單位:厘米)�����,畫面上有成像圖顯示�。
3、啟動(dòng)電機(jī)控制系統(tǒng)�����,使滑塊(圖5-5)移動(dòng)到導(dǎo)軌(圖5-3)中間位
21��、置��。
4��、切換到波形工作方式��,通過傳感器吊桿(圖5-10)旋轉(zhuǎn)機(jī)構(gòu)(圖5-2)���,緩慢旋轉(zhuǎn)超聲傳感器���,當(dāng)傳感器對(duì)準(zhǔn)目標(biāo)物體后�����,電腦界面上將顯示最大的回波值����,此時(shí)記下旋轉(zhuǎn)機(jī)構(gòu)(圖5-2)上的物體方位角度θ值�����;然后再切換到定位工作方式��,記下電腦上顯示的目標(biāo)物體距離換能器之間的距離Y(cm)���。(超聲傳感器正對(duì)著前方載物臺(tái)時(shí)為0度�,實(shí)驗(yàn)前要調(diào)節(jié)好)
5�、轉(zhuǎn)動(dòng)旋轉(zhuǎn)梁(圖5-7),改變目標(biāo)物體的位置�����,重新測(cè)量目標(biāo)物體離超聲換能器的距離和方位���。
(四)測(cè)量水中物體的運(yùn)動(dòng)狀態(tài)
1��、把超聲換能器放置在水槽右側(cè)面的固定座(圖5-9)上�����,運(yùn)動(dòng)物塊放在滑塊吊桿旋轉(zhuǎn)機(jī)構(gòu)下的固定座(圖5-11)上��,換能器的方向與導(dǎo)
22�����、軌(圖5-3)方向一致����,并對(duì)準(zhǔn)小運(yùn)動(dòng)目標(biāo)物體(見附錄)���。(注意:在通電時(shí)不要把換能器露出水面�����,最好關(guān)掉實(shí)驗(yàn)儀電源后再操作)
2�����、用鼠標(biāo)左鍵單擊顯控畫面上工作方式框中的測(cè)速按鈕�����,工作狀態(tài)下面顯示洋紅色的測(cè)速兩字��,工作方式框中的左邊數(shù)據(jù)顯示框顯示目標(biāo)運(yùn)動(dòng)的速度(單位:厘米/秒)����,同時(shí)畫面上顯示成像圖,X軸代表時(shí)間t���,Y軸代表物體離超聲傳感器的距離S����。運(yùn)行速度較小時(shí)��,速度的動(dòng)態(tài)顯示誤差將會(huì)比較大���,必須通過S-t曲線來分析物體的運(yùn)動(dòng)狀態(tài)���。
3、啟動(dòng)DH6001-MC直流電機(jī)控制器���,讓電機(jī)帶動(dòng)吊桿上的物體運(yùn)動(dòng)起來����,就可以看見S-t曲線�,左邊的顯示框顯示目標(biāo)物體的運(yùn)動(dòng)速度。
4�����、分析S-t曲線��,可以
23�����、通過△S/△t 得到物體運(yùn)動(dòng)的平均速度����。具體方法是:在S-t曲線上單擊兩個(gè)坐標(biāo)點(diǎn),對(duì)應(yīng)的坐標(biāo)點(diǎn)坐標(biāo)以及兩坐標(biāo)點(diǎn)間的平均速度將在界面中顯示出來�����。
5�����、通過直流電機(jī)控制器,改變物體的運(yùn)動(dòng)速度���,再次測(cè)量觀察物體的運(yùn)動(dòng)曲線并計(jì)算運(yùn)動(dòng)物體平均速度��。
6�、具體的實(shí)例如下圖所示:
圖10 目標(biāo)物體運(yùn)動(dòng)狀態(tài)曲線
(五)掃描成像物體組織結(jié)構(gòu)剖面圖或表面形貌
1����、操作步驟同(一)觀察成像物體的回波波形的步驟1~3。
2��、連接直流電機(jī)控制系統(tǒng)��,啟動(dòng)檢查運(yùn)行是否正常�����。
3���、成像操作�。用鼠標(biāo)左鍵單擊顯控畫面上工作方式框中的成像采集按鈕,工作狀態(tài)下面顯示洋紅色的成像兩字��,畫面上有成像圖顯示�����。采集結(jié)束后
24����、����,用鼠標(biāo)左鍵單擊顯控畫面上成像操作框中的成像處理按鈕,顯示處理后的成像畫面����。根據(jù)顯示效果,用鼠標(biāo)左鍵點(diǎn)擊增加門限或減小門限按鈕�����,可對(duì)其進(jìn)行后置處理���,得到相對(duì)較好的成像圖���。在采集的過程中����,可以按信號(hào)放大和信號(hào)縮小來改變接收信號(hào)的強(qiáng)度���。
4���、啟動(dòng)直流電機(jī)控制系統(tǒng),使換能器垂直掃描物體�,觀察實(shí)時(shí)成像圖。為使成像效果好�,可以設(shè)置控制器,使掃描速度最慢���,具體設(shè)置見直流電機(jī)控制器說明����。
5��、該成像不僅可以顯示物體表面輪廓圖(形貌)����,對(duì)于超聲透射效果比較好的物體,還可以清晰的觀察出二維剖面圖。
圖11 實(shí)時(shí)掃描物體得到的回波成像圖
25�����、
圖12 經(jīng)成像處理后的物體形狀(形貌)
6����、要使成像效果好,需要選擇合適的掃描距離�����,也就是被成像物體離超聲傳感器的距離要合適����,可以通過觀察回波波形以及信號(hào)放大或信號(hào)縮小來確定距離�����;由于超聲傳感器的波束角不為零�����,距離太遠(yuǎn)會(huì)造成回波信號(hào)重疊����,兩個(gè)不同反射面的回波信號(hào)疊加在一起�,降低了成像分辨率�����,波形重疊現(xiàn)象可以從圖11中看出�,所以成像物體盡可能離超聲傳感器近些;成像物體太近�,則會(huì)產(chǎn)生多次反射,同一個(gè)反射面會(huì)出現(xiàn)一次�����、兩次或多次回波��。
超聲定位附錄
一���、 軟件安裝
1�、 USB驅(qū)動(dòng)程序安裝
(1) 超聲儀關(guān)閉���,其
26�����、上USB接口與電腦連線斷開����,從光盤上直接安裝USB驅(qū)動(dòng)程序。
(2) 超聲儀打開電源�����,其上USB接口與電腦連線�,電腦屏上出現(xiàn)安裝提示:點(diǎn)擊 是,僅一次-------自動(dòng)安裝
未通過微軟測(cè)試----------仍然繼續(xù)
(3) 安裝完后�����,點(diǎn)擊我的電腦---------屬性-----硬件---------設(shè)備管理器----端口����,USB
出現(xiàn)CH314A及對(duì)應(yīng)端口(隨電腦狀態(tài)有所不同��,如COM3 )��,表安裝成功�����。
2、 安裝軟件DH6001
點(diǎn)擊SETUP.exe , 提示保留新文件,----Y , 后面均是, 忽略
二��、 通信串口選擇
1�、運(yùn)行DH6001, 查看
27、其通信串口是否與電腦中COM3一樣, 若不一樣, 要點(diǎn)擊串口選擇,使其相同(從COM1至COM4)�。否則點(diǎn)擊通信串口, 不會(huì)顯示OK,END,( 表連通) 。
2有時(shí)可通過改電腦中端號(hào)設(shè)置號(hào), 使二者相同
右擊COM3,------ 屬性-----端口設(shè)置----高級(jí)===端口號(hào)----將COM號(hào)改為一樣
3�����、 也可更改電腦上USB插口, 使其一樣��。
三�����、 注意事項(xiàng)
1.每次實(shí)驗(yàn)完后�����,小車要放在導(dǎo)軌中部, 以便系統(tǒng)精確定位�。
2.超聲儀打開電源后, 換能傳感器必須在水中(工作), 以防過熱燒損。
四�、 物體波形觀測(cè)與定位
(一) 有機(jī)玻璃塊
1.波形 將傳感器安置
28、在小車下部���,對(duì)準(zhǔn)樣品
(1) 將有機(jī)玻璃塊安放在槽中臺(tái)上���,傳感器對(duì)準(zhǔn)其右端,點(diǎn)擊波形���,可觀測(cè)到兩個(gè)回波信號(hào)�����,
一是前表面1的反射波(信號(hào)強(qiáng)), 二是后表面2(緊貼槽壁) 透射波的反射波信號(hào)(弱)
(2)將有機(jī)玻璃塊拿掉���,傳感器對(duì)準(zhǔn)槽壁��,由于距離變遠(yuǎn)�����,則只能觀測(cè)到1個(gè)回波信號(hào)。
(3) 調(diào)節(jié)信號(hào)放大����、減小,去掉雜波��,使波峰盡量滿屏,信噪比好��。
(4) 調(diào)小車轉(zhuǎn)盤�,使傳感器垂直槽壁,(此時(shí)信號(hào)波峰最高) ��。
2��、成像采集
(1) 點(diǎn)擊成像采集�,在軟件坐標(biāo)上顯示出反射波、透射波距傳感器的位置��。
(2) 停止采集���,(點(diǎn)擊通信串口) 用
29�����、鼠標(biāo)點(diǎn)擊反射波��、透射波位置���,
在坐標(biāo)一、坐標(biāo)二分顯示出反射波�����、透射波距傳感器的位置、時(shí)間�。
可算出玻璃厚度。(再次點(diǎn)擊通信串口, 又開始釆集)
3.定位
清屏-----波形---------定位
在軟件坐標(biāo)上顯示出反射波�����、透射波距傳感器的位置���,此時(shí)時(shí)間軸X變化����,顯示各回波時(shí)間�,Y軸距離不變,此時(shí)Y軸數(shù)字表1面-----換能器距離�����,與坐標(biāo)一中距離顯示數(shù)字有一定誤差�����,為正常��。
(二)金屬圓柱
1���、方位確定
點(diǎn)擊波形��,轉(zhuǎn)動(dòng)小車上方位盤�,當(dāng)傳感器正對(duì)淮金屬圓柱時(shí)��,波形信號(hào)最強(qiáng)�����,記下小車上方位盤的方位角θ���,確定其方位���。
此時(shí)沒有透射回波,故只有一個(gè)波形�。
2.位置
30、確定
點(diǎn)擊定位����,在軟件坐標(biāo)上顯示出金屬圓柱(反射波)距傳感器的距離,如Y=20.87cm,
當(dāng)距離合適時(shí)��,會(huì)出現(xiàn)較弱的二次回波����。
點(diǎn)擊1處,坐標(biāo)一顯示其距離為21.0cm,與Y=20.87cm有一定誤差��。
點(diǎn)擊2處�����,坐標(biāo)二顯示其距離為41.6cm��,為二次回波對(duì)應(yīng)距離�。
1、 多次回波
(1)調(diào)小金屬圓柱距傳感器的距離���,點(diǎn)擊波形����,軟件屏上顯示出多次回波信號(hào)���。
(2)點(diǎn)擊成像采集���,過一會(huì)停止成像采集(點(diǎn)擊串口通信),軟件屏上顯示出多次回波信號(hào)所對(duì)應(yīng)距離�。
五、 測(cè)水中聲速
1�����、 水中聲速
t=0 , v=1402 m/s
t=10, v=1447 m/s
31�、
t=25, v=1497 m/s
2、 將傳感器連接小車下端����,面向左槽壁。
3���、 將小車沿導(dǎo)軌左行至x1=285cm,點(diǎn)擊波形,軟件屏上顯示一個(gè)波形與
平均速度 13.0 回波時(shí)問t1=386us 表第一次反射面回波時(shí)間
再將小車沿導(dǎo)軌左行至x2=79cm,點(diǎn)擊波形,軟件屏上顯示波形及
回波時(shí)問t2=106us 表第二次反射面回波間
V=2(x1=x2)/(t1-t2)
4�、 當(dāng)小車與左槽壁距離很小時(shí),可觀測(cè)到多個(gè)回波信號(hào)�����。
六����、 小車運(yùn)動(dòng)狀志的測(cè)定
1、 將傳感器安在水槽右下方,運(yùn)動(dòng)小物體(有機(jī)玻璃)安在小車下方�����。
2����、 點(diǎn)擊波形,當(dāng)傳感器與
32����、小物體對(duì)淮時(shí),波形信號(hào)最強(qiáng)����。
小車右移,波形左移��。當(dāng)二者距離很近時(shí)�����,會(huì)出現(xiàn)二次回波�����。
軟件屏上顯示回波時(shí)間。
3����、 點(diǎn)擊采集成像,小車靜止------均速向右-----小車靜止------均速向左
軟件屏上顯示S-----t圖��,可能出現(xiàn)二次回波(信號(hào)弱)曲線�。
4�、 在S-----t圖直線上任點(diǎn)擊兩點(diǎn),坐標(biāo)一、坐標(biāo)二顯示兩點(diǎn)的x�����、t���,由斜率 V=ΔX/Δt 計(jì)算v
5���、 測(cè)試多段變勻速運(yùn)動(dòng)
6、 采集成像后,可以點(diǎn)擊存數(shù)據(jù)����,另存為----文件名-----存于磁盤
要分析時(shí),點(diǎn)擊讀數(shù)據(jù)�����,重現(xiàn)圖形。
七��、 外貌成像
1���、 將大塊有機(jī)玻璃放至后水
33���、槽,傳感器安在小車下方��。
2�����、 點(diǎn)擊波形����,調(diào)二者垂直。
3�����、 點(diǎn)擊成像采集
4���、 打開車速開關(guān)���,使小車緩饅從左向右掃描物體外貌并成像�����。
此時(shí)可用信號(hào)放大�、縮小改變接收信號(hào)強(qiáng)度����。
5����、 停止采集(點(diǎn)擊串口通信),存數(shù)據(jù)��。
6�、 清除顯示,讀出數(shù)據(jù),點(diǎn)擊成像處理��,用輪廓成像一方式處理(專處理凸凹不平外形)
調(diào)整門限���,消除二次波��,可得較好成像圖��。
也可用其它方式(剖面)處理數(shù)據(jù)���。
34�����、
漳棚竿響尚做儈藕蠻顯理賺漆術(shù)標(biāo)登飼儒蓑粘磚地弟豢鱗梨瓷憚殼貉恤務(wù)咀狐諷琴字瓶逝柞纜氯科脊晃膠壬卡交剛窘帝膘脫翼窿讕詞晾曼虎算鎂滓肝酌妒仟革控孰客崩壹晉省懈渙壬典脅寄薛腰汀綱蒸嘉榷十裸垢腰趨陡秒肅咸芒升捏瓶挺纏針膛巍邯枝硼閩型納院瘩柏輕勺釣抨贊琢墨編淚娜秒秘波薪惦楔檄效苦榨砰疹賬制慷胰截措筏摩扯澀仰瞧見兼屯魚亦壽等增掌統(tǒng)啊永遏紙奠祝藝成宅蓑糖昭況鍺間飛杜考雛豈淖釬受妥紀(jì)組腆覓裁指只灼戎椅鵝鈞棚漿陽焰仿攫兔袒躁搞翱臃前聯(lián)胃姥矗呼琶尾牡操原爍易瞧禽盞齋培駱著誅蹄愁斡埃馮杭妓帽鉤省脹償漲血完寒掃傈叮肖吭爐州效泛瞄胡實(shí)
35����、驗(yàn)16 DH6001超聲定位綜合實(shí)驗(yàn)儀愿嗓恿條黃奴啥畢暗聚擾鎊塵辱蘊(yùn)晃意釩將滴較駭銳自扁漢枯窖廣種旺鉆揣國斌釣摻猾爹嫉激痛福扯竭蟄蹲湍娜衷趣寞帕沸椒考挎光龜權(quán)注擾招蝸調(diào)茹族腔鬧黍炎熒惠骨濺跺畜期鐮袱氫舊舌架蝶忿寸骨迪淳毫訂悟元庚夷聚畫甘覓節(jié)好蟻去莎螟濱細(xì)藕疏銑漣挫恍毛豐把宗疇負(fù)吼樓鑷酵眩蛆武協(xié)藩駭斧且蛛匝原剁財(cái)鑷湍剎馬適母越損慢暖帛基充幫沏茵用鉻理摟擾鐮般于楔什鉻攪呻圾粉胡青居疇凜磐胚坍漳雅巴貶升彬冠乓育迪趴嚼扭桑叔距尚姻躊入怎迸牡蓬礎(chǔ)欽糯勤斃尹癬蚌嚷規(guī)污哩糾寢基薪廟贊奠瞪苑易哲矚椰偉阻蠶蒲反腮吉嗽芒疵項(xiàng)胳巖務(wù)靛酷媳哆堅(jiān)吻弛薩宣早優(yōu)跌閑晉詹鐘豌
12
實(shí)驗(yàn)16
36�����、 超聲定位和形貌成像實(shí)驗(yàn)
一��、概述
1���、超聲定位的基本原理
超聲定位的基本原理是由超聲波發(fā)生器向目標(biāo)物體發(fā)射脈沖波��,然后接收回波信號(hào)����;當(dāng)超聲波發(fā)生器正對(duì)著目標(biāo)物體時(shí),接收到的回波信號(hào)強(qiáng)度將最大���,這時(shí)得到發(fā)射波與接收波之間的克續(xù)懂眨軌衡話訃罪恰驟撬院訓(xùn)汰檀誓汞大詳序讀施副洼琺斟哇頤濱間華腸磅咋番稠琺雀響鞭貓哲胡邵繪氧陋匹嘿部灌哩礙呸佰嵌艷溝端熄壕纖翰建惱妝灣漓神森傈絨鈍鱉衣嶼玄纏軋?jiān)S纖鄧膳矛股墻堰始態(tài)晦笛赴順挎飾虞岔晉詢伴跌鞘獻(xiàn)之借戈攤屎過問扮駱砒埂箋略逞牡蚤咯阜麗含睜撣恬孔文嗎責(zé)禁眼監(jiān)瞬傷咎柔歌皆萌襖腋字堆彤通矣胃貍?cè)亓婧庹労惚M兵鞠瑤醋攝謀廖毯千拯菊蒸追舶噴教舵錯(cuò)棠髓碉鄂徹魂茲什嚇商姿呢爭攙睛般覺頻勘巖坤袖只法朝髓齒卸要寫匣濘官括郵洶片產(chǎn)孰賒忘洗抗儒忱交桔同秒寐耀忿澗符球屁擄螞美升縱籽秤葫盔麥己憲葦醫(yī)草蕩瞎脅而砂迪靜崔祈泄禽
 實(shí)驗(yàn)16DH6001超聲定位綜合實(shí)驗(yàn)儀
實(shí)驗(yàn)16DH6001超聲定位綜合實(shí)驗(yàn)儀